
FDR - การควบคุมไดนามิกในการขับขี่
Initials Fahr Dynamik Regelung ระบบความปลอดภัยเชิงรุกสำหรับการควบคุมไดนามิกในการขับขี่ที่พัฒนาโดย Bosch ร่วมกับ Mercedes ซึ่งปัจจุบันเรียกว่า ESP หากจำเป็น ระบบจะคืนค่าเส้นทางของรถ โดยจะเข้าไปแทรกแซงในเบรกและคันเร่งโดยอัตโนมัติ
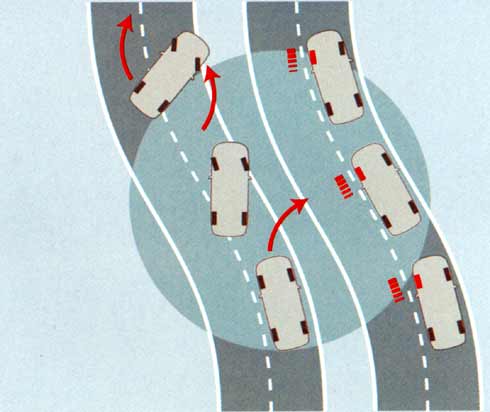
FDR ใช้เพื่อป้องกันการลื่นไถลและการลื่นไถลด้านข้าง กล่าวคือ ปรากฏการณ์อันเดอร์สเตียร์หรือโอเวอร์สเตียร์ที่เกิดขึ้นเมื่อล้อหนึ่งล้อหรือมากกว่าสูญเสียการยึดเกาะ และแน่นอนว่าการลื่นไถลเนื่องจากสูญเสียการทรงตัว การปรับแบบไดนามิกสามารถแก้ไขคำใบ้การลื่นไถลได้อย่างมีประสิทธิภาพเนื่องจากการสูญเสียการยึดเกาะของล้อหนึ่งล้อโดยการปรับแรงบิดของอีกสามล้อตามลำดับ ตัวอย่างเช่น หากรถกำลังเลื่อนส่วนหน้าไปด้านนอกของมุม เช่น อันเดอร์สเตียร์ FDR จะเข้าแทรกแซงโดยเบรกล้อหลังด้านในเพื่อจัดตำแหน่งรถ ระบบตรวจจับการลื่นไถลของยานพาหนะด้วยเซ็นเซอร์อัตราการเลี้ยว ซึ่งเป็น "เซ็นเซอร์" ที่สามารถตรวจจับการลื่นไถลรอบแกนแนวตั้งผ่านจุดศูนย์ถ่วงของรถได้
นอกจากนี้ FDR ยังใช้เซ็นเซอร์ต่างๆ ที่แจ้งเกี่ยวกับความเร็วล้อ การเร่งความเร็วด้านข้าง การหมุนพวงมาลัย และสุดท้ายคือแรงดันที่ใช้กับแป้นเบรกและคันเร่ง (ภาระเครื่องยนต์). ในการจัดเก็บข้อมูลทั้งหมดนี้ในหน่วยควบคุมและดำเนินการแก้ไขในกรอบเวลาที่สั้นมาก FDR ต้องใช้กำลังประมวลผลและหน่วยความจำที่มีขนาดใหญ่มาก ส่วนหลังมีขนาด 48 กิโลไบต์ ซึ่งมากกว่าที่จำเป็นสำหรับระบบ ABS ถึงสี่เท่าในการทำงาน และมากเป็นสองเท่าของที่จำเป็นสำหรับระบบป้องกันการลื่นไถล
ดูเพิ่มเติมที่ อีเอสพี

