ขับเคลื่อนสี่ล้อหน้าหรือหลังดีกว่ากัน
Содержание
การขับเคลื่อนในรถเป็นการถ่ายเทแรงบิดจากเครื่องยนต์ไปยังล้อใดๆ ซึ่งจะกลายเป็นตัวขับเคลื่อน ดังนั้น รถยนต์ทุกคันจึงเริ่มมีคุณสมบัติที่สำคัญเช่นสูตรล้อ โดยที่หลักแรกหมายถึงจำนวนล้อทั้งหมด และตัวที่สองคือจำนวนล้อที่ขับ

แต่แนวคิดนี้ไม่ได้สะท้อนคุณสมบัติที่สำคัญอีกประการหนึ่งของแชสซีส์ของรถยนต์ เพลาใดที่ขับเคลื่อนด้วยพาร์ทไทม์ ด้านหลังหรือด้านหน้า แม้ว่าสำหรับรถยนต์ขับเคลื่อนสี่ล้อ 4 × 4 หรือแม้แต่ 6 × 6 นั้นไม่สำคัญ
ขับเคลื่อนสี่ล้อคืออะไร แตกต่าง จากด้านหลังและด้านหน้า
แต่ละประเภทมีข้อดีและข้อเสียของตัวเอง ดังนั้นจึงยังคงมีอยู่ในสมดุลสัมพัทธ์ จากมุมมองทางทฤษฎี รถขับเคลื่อนล้อหน้าหรือล้อหลังได้มาจากระบบขับเคลื่อนสี่ล้อโดยเพียงแค่กำจัดชิ้นส่วนเกียร์ที่ส่งแรงฉุดลากไปยังล้อเดียวหรืออีกล้อหนึ่ง อันที่จริง เทคโนโลยีไม่ได้ง่ายนักที่จะบรรลุ
หน่วยบังคับของรถยนต์ขับเคลื่อนสี่ล้อคือกล่องขนย้ายหรือกล่องขนย้าย ซึ่งกระจายแรงบิดไปตามเพลา
ในรถยนต์แบบโมโนไดรฟ์นั้นไม่จำเป็น แต่ไม่สามารถแยกออกได้ เคสการถ่ายโอนถูกรวมเข้ากับโครงร่างทั่วไปของหน่วยพลังงาน ดังนั้นรถทั้งคันจึงต้องมีการจัดเรียงใหม่
ในกรณีตรงกันข้าม หากการดัดแปลงระบบขับเคลื่อนสี่ล้อถูกเพิ่มเข้ามาในไลน์เริ่มต้น เช่น รถยนต์ขับเคลื่อนล้อหน้าในรุ่นเดียวกัน จะทำให้เกิดความยุ่งยากอย่างมาก
ผู้ผลิตจำนวนมากไม่ได้พยายามเพิ่มรุ่น 4 × 4 ลงในรถยนต์แฮทช์แบคและรถเก๋ง โดยจำกัดตัวเองให้เพิ่มระยะห่างจากพื้นและชุดตัวถังพลาสติกสำหรับการดัดแปลงข้าม
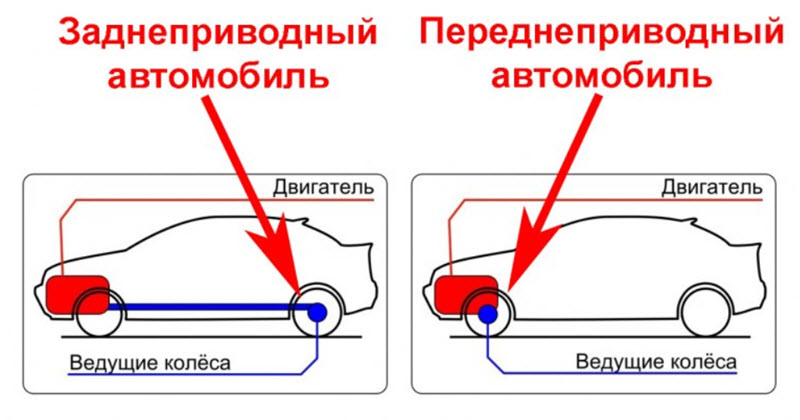
สิ่งนี้ใช้กับเค้าโครงโดยรวมด้วย ในอดีต ในรถยนต์ขับเคลื่อนล้อหน้า หน่วยส่งกำลังตั้งอยู่ตรงข้ามห้องเครื่อง กระปุกเกียร์มีเพลาสองเพลาพร้อมข้อต่อความเร็วคงที่ (ข้อต่อ CV) ไปที่ล้อหน้า ซึ่งขับเคลื่อนและควบคุมไปพร้อม ๆ กัน
ในทางกลับกัน สำหรับระบบขับเคลื่อนล้อหลัง มอเตอร์พร้อมกล่องจะตั้งอยู่ตามแกนของรถ จากนั้นเพลาขับจะไปที่เพลาล้อหลัง ระบบขับเคลื่อนสี่ล้อสามารถใช้งานได้กับระดับความซับซ้อนต่างกันในทั้งสองกรณีนี้
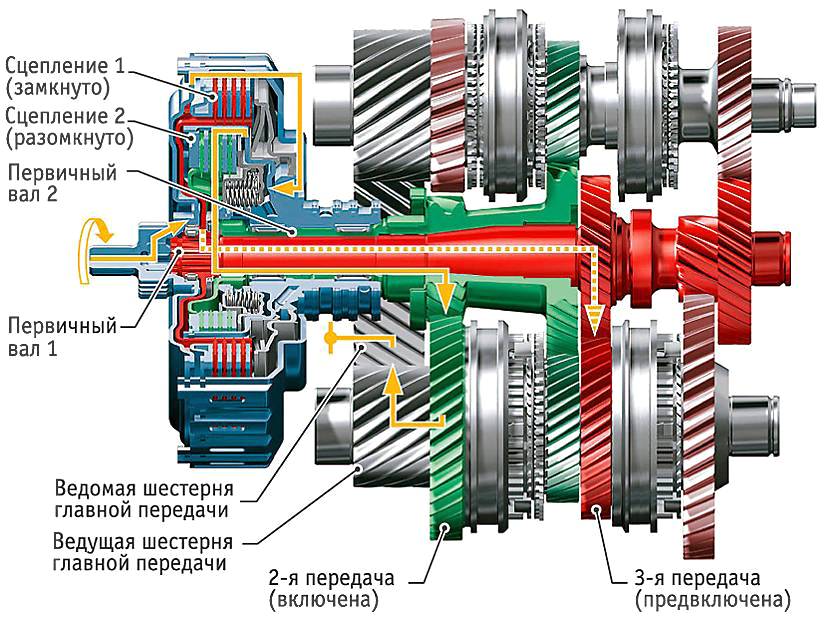
อุปกรณ์และหลักการทำงาน
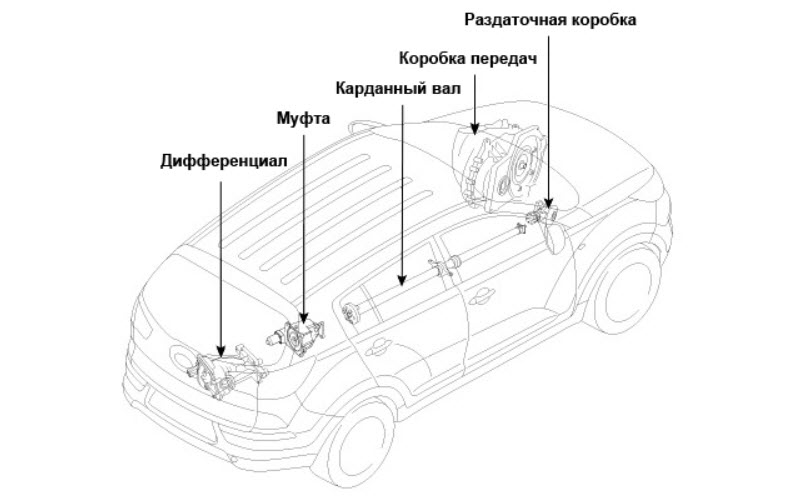
ในการส่งแรงบิดจะใช้ชุดส่วนประกอบและชุดประกอบที่ประกอบเป็นชุดเกียร์
มันรวมถึง:
- กระปุกเกียร์ (กระปุกเกียร์) รับผิดชอบการเปลี่ยนแปลงอัตราทดเกียร์ทั้งหมดนั่นคืออัตราส่วนของความเร็วในการหมุนของเพลาเครื่องยนต์ต่อความเร็วของล้อขับเคลื่อน
- กล่องถ่ายโอนแบ่งแรงบิดตามอัตราส่วนที่กำหนด (ไม่จำเป็นต้องเท่ากัน) ระหว่างเพลาขับ
- เกียร์คาร์ดานพร้อมข้อต่อ CV หรือข้อต่อของฮุค (กากบาท) ที่ส่งการหมุนในระยะไกลในมุมต่างๆ
- กระปุกเกียร์เพลาขับเพิ่มเติมเปลี่ยนความเร็วของการหมุนและทิศทางของการส่งแรงบิด
- เพลาเพลาเชื่อมต่อกระปุกเกียร์กับดุมล้อ

ดังที่ได้กล่าวไปแล้วสองสิ่งหลักซึ่งเป็นลักษณะของหน่วยกำลังตามขวางและตามยาวนั้นโดดเด่นจากชุดของโครงร่างทั้งหมด
- ในกรณีแรก กล่องโอนจะติดอยู่ที่ด้านข้างของกระปุกเกียร์ ในขณะที่เรียกอีกอย่างว่ากระปุกเกียร์เชิงมุม ด้วยเหตุผลด้านเลย์เอาต์ เพลาขับของล้อหน้าอันใดอันหนึ่งจึงถูกส่งผ่าน ช่วงเวลานี้จะถูกถอดไปยังเพลาล้อหลังโดยคู่เกียร์ที่มีเฟืองเกียร์ไฮปอยด์ ซึ่งการหมุนจะหมุนไป 90 องศาและไปยังเพลาคาร์ดานที่วิ่งไปตาม รถยนต์.
- กรณีที่สองมีลักษณะเฉพาะโดยตำแหน่งของกล่องโอนบนแกนเดียวกับเพลาส่งออกของกระปุกเกียร์ เพลาคาร์ดานไปยังล้อหลังตั้งอยู่ร่วมกับเพลาอินพุตของเคสโอน และเพลาด้านหน้าเชื่อมต่อผ่านชุดเกียร์คาร์ดานเดียวกัน แต่ด้วยการเลี้ยว 180 องศาและเปลี่ยนเกียร์ลงหรือไปด้านข้าง
razdatka นั้นค่อนข้างง่าย โดยรับผิดชอบเฉพาะการแตกแขนงของช่วงเวลาหรือความซับซ้อน เมื่อมีการแนะนำฟังก์ชันเพิ่มเติมเพื่อเพิ่มความสามารถหรือความสามารถในการควบคุมข้ามประเทศ:
- demultiplier นั่นคือ overdrive สำหรับการคูณแรงบิดบนท้องถนน
- ดิฟเฟอเรนเชียลที่กระจายโมเมนต์ตามสัดส่วนที่กำหนด
- คลัตช์แรงเสียดทานแม่เหล็กไฟฟ้าทำหน้าที่เป็นตัวกระตุ้นในระบบควบคุมความสามารถในการส่งสัญญาณอัตโนมัติ
- เพลาส่งกำลังไปยังอุปกรณ์เพิ่มเติม
กล่องเกียร์ของเพลาขับบนเครื่องจักร 4×4 ยังสามารถซับซ้อนได้จากการมีดิฟเฟอเรนเชียลควบคุมหรือคลัตช์อิเล็กทรอนิกส์ บังคับล็อกและแยกการควบคุมล้อของเพลาเดียว
ประเภทของขับเคลื่อนสี่ล้อ
ในโหมดการขับขี่ต่างๆ จะมีประโยชน์มากในการกระจายแรงบิดระหว่างล้อเพื่อเพิ่มประสิทธิภาพในด้านหนึ่ง และความสามารถในการข้ามประเทศในอีกทางหนึ่ง ยิ่งไปกว่านั้น ยิ่งการส่งสัญญาณมีความซับซ้อนมากเท่าไร ก็ยิ่งมีราคาแพง ดังนั้นประเภทและคลาสของเครื่องจักรจึงใช้รูปแบบการขับเคลื่อนที่แตกต่างกัน
คงที่
ตรรกะที่สุดคือการใช้ระบบขับเคลื่อนสี่ล้อเสมอและในทุกสภาพถนน สิ่งนี้จะช่วยให้มั่นใจถึงความสามารถในการคาดการณ์ของปฏิกิริยาและความพร้อมคงที่ของเครื่องสำหรับการเปลี่ยนแปลงใดๆ ในสถานการณ์ แต่ราคานี้ค่อนข้างแพง ต้องใช้ต้นทุนเชื้อเพลิงเพิ่มเติมและไม่ได้สมเหตุสมผลเสมอไป
รูปแบบคลาสสิกของระบบขับเคลื่อนทุกล้อแบบถาวร (PPP) ในความเรียบง่ายทั้งหมดถูกนำมาใช้กับรถยนต์โซเวียตรุ่น Niva เครื่องยนต์ตามยาว จากนั้นเป็นกล่อง กล่องเกียร์เชื่อมต่อผ่านเพลาคาร์ดานแบบสั้นจากตำแหน่งที่เพลาสองอันไปยังเพลาหน้าและเพลาหลัง
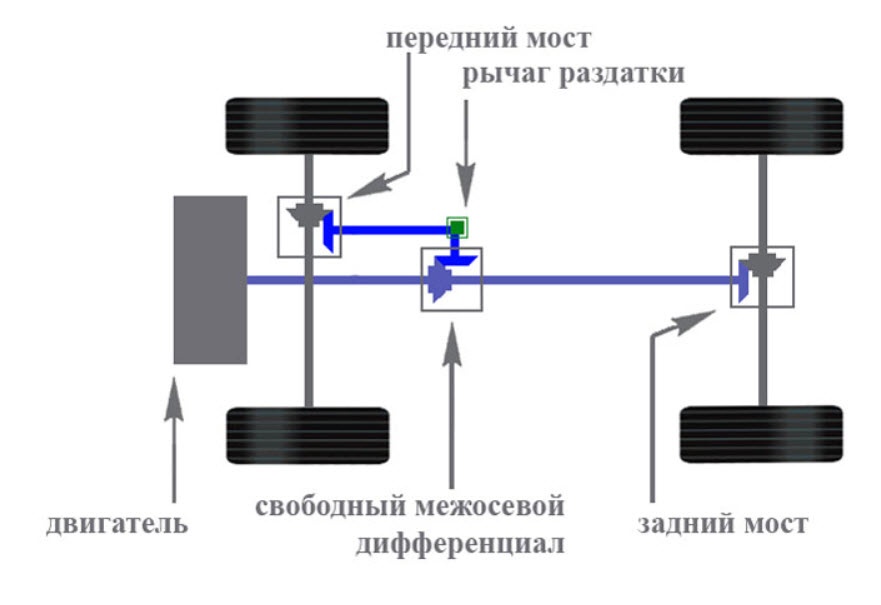
เพื่อให้มั่นใจถึงความเป็นไปได้ของการหมุนล้อหน้าและล้อหลังที่ความเร็วต่างกันซึ่งเป็นสิ่งสำคัญบนทางเท้าที่แห้งในมุม เฟืองท้ายไม่มีเฟืองท้ายในกล่องขนถ่าย ซึ่งสามารถปิดกั้นเพื่อให้ล้อขับเคลื่อนออกอย่างน้อยสองล้อ -ถนนเมื่ออีกสองคนลื่นไถล
นอกจากนี้ยังมี demultiplier ที่เพิ่มแรงขับประมาณสองเท่าด้วยความเร็วที่ลดลงเท่ากัน ซึ่งช่วยให้เครื่องยนต์ที่ค่อนข้างอ่อนแอได้อย่างมาก
ล้อขับเคลื่อนจะมีแรงบิดอยู่เสมอ จนกระทั่งล้อตัวใดตัวหนึ่งหยุดนิ่ง นี่คือข้อได้เปรียบหลักของการส่งสัญญาณประเภทนี้ ไม่จำเป็นต้องคิดเกี่ยวกับการระดมพลด้วยตนเองหรือสร้างระบบอัตโนมัติที่ซับซ้อน
โดยธรรมชาติแล้ว การใช้ PPP ไม่ได้จำกัดอยู่ที่ Niva เพียงตัวเดียว มันถูกใช้กับรถยนต์พรีเมี่ยมราคาแพงจำนวนมาก ที่ราคาของปัญหาไม่สำคัญจริงๆ
ในเวลาเดียวกัน การส่งสัญญาณจะได้รับบริการอิเล็กทรอนิกส์เพิ่มเติมจำนวนมาก ส่วนใหญ่เพื่อปรับปรุงความสามารถในการควบคุมด้วยพลังงานส่วนเกิน โครงการนี้อนุญาต

อัตโนมัติ
การเชื่อมต่อเพลาขับเพิ่มเติมกับอุปกรณ์อัตโนมัติมีหลายรุ่น โดยสามารถแยกแยะรูปแบบเฉพาะได้สองแบบ ใช้กับ BMW และรุ่นพรีเมียมอื่นๆ อีกมากมาย และคลัตช์ในระบบขับเคลื่อนล้อหลังโดยทั่วไปสำหรับรถครอสโอเวอร์ขนาดใหญ่
ในกรณีแรก ทุกอย่างถูกกำหนดให้กับคลัตช์ใน razdatka ด้วยไดรฟ์อิเล็กทรอนิกส์ การยึดหรือละลายคลัตช์ที่ทำงานในน้ำมัน สามารถเปลี่ยนการกระจายโมเมนต์ตามแกนได้หลากหลาย
โดยปกติเมื่อสตาร์ทด้วยเครื่องยนต์อันทรงพลัง เมื่อล้อหลังของไดรฟ์หลักเริ่มลื่น ล้อหน้าจะเชื่อมต่อเพื่อช่วยพวกเขา มีอัลกอริธึมการแจกจ่ายอื่น ๆ พวกมันเดินสายในหน่วยความจำของหน่วยควบคุมที่อ่านการอ่านค่าของเซ็นเซอร์จำนวนมาก
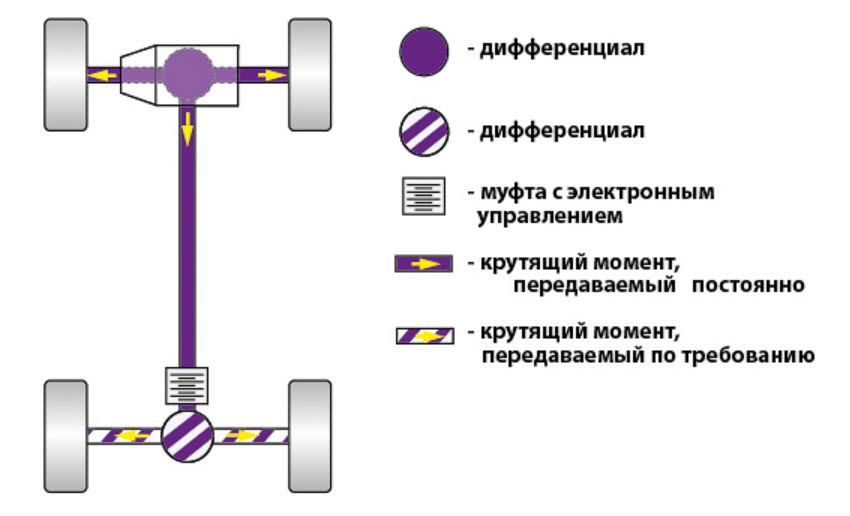
กรณีที่สองมีความคล้ายคลึงกัน แต่ล้อหลักอยู่ด้านหน้าและล้อหลังเชื่อมต่อกันเป็นเวลาสั้น ๆ ผ่านข้อต่อระหว่างเพลาคาร์ดานและกระปุกเกียร์ของเพลา
คลัตช์ร้อนเกินไปอย่างรวดเร็ว แต่คาดว่าจะใช้งานได้ไม่นาน บางครั้งคุณจำเป็นต้องผลักรถผ่านเพลาล้อหลังเล็กน้อยบนถนนที่ลื่นหรือในโค้งที่ยากลำบาก นี่คือวิธีสร้างครอสโอเวอร์เกือบทั้งหมดในการดัดแปลง 4 × 4
บังคับ
ระบบขับเคลื่อนสี่ล้อแบบเรียบง่ายและราคาถูกที่สุด ซึ่งใช้ในรถ SUV อเนกประสงค์ที่มีสถานที่ทำงานถาวรอยู่นอกทางเท้า เพลาหลังทำหน้าที่เป็นเพลาขับคงที่ และหากจำเป็น คนขับสามารถเปิดเพลาหน้าแบบแข็งได้โดยไม่มีส่วนต่าง
ดังนั้นบนพื้นผิวที่แข็ง รถจะต้องขับเคลื่อนล้อหลัง มิฉะนั้น เกียร์จะเสียหาย แต่เครื่องจักรดังกล่าวมีความปลอดภัยสูง ซ่อมแซมง่ายและราคาไม่แพง
ปิ๊กอัพและ SUV นำเข้าจำนวนมากมีการดัดแปลงดังกล่าว ซึ่งบางครั้งมีราคาแพงและซับซ้อนในรุ่นไดรฟ์เสริมขั้นสูง
ข้อดีและข้อเสียของ 4WD (4x4)
อันที่จริงแล้วลบหนึ่ง - ราคาของปัญหา แต่มันปรากฏขึ้นทุกที่:
- ในขั้นต้นรถนั้นยากกว่าดังนั้นจึงมีราคาแพงเมื่อซื้อ
- ต้องซ่อมแซมบ่อยขึ้นยิ่งมีอุปกรณ์มากเท่าใดความน่าเชื่อถือก็จะยิ่งต่ำลงเท่านั้น
- เนื่องจากชิ้นส่วนที่หมุนเพิ่มเติมทำให้สิ้นเปลืองเชื้อเพลิงมากขึ้น
- การเพิ่มน้ำหนักซึ่งส่งผลต่อพลวัตและประสิทธิภาพ
- ความซับซ้อนที่เพิ่มขึ้นในการจัดวางยูนิตซึ่งสะท้อนให้เห็นความซับซ้อนของการบำรุงรักษา
อย่างอื่นเป็นบุญ:
- ความสามารถในการข้ามประเทศที่สมบูรณ์แบบล้อทุกล้อเต็มไปด้วยแรงบิด
- เครื่องจักรได้รับการควบคุมที่ดีขึ้นเนื่องจากเวกเตอร์แรงขับเพิ่มเติมบนเพลาควบคุม
- ไดนามิกที่ดีขึ้นบนถนนลื่น, ยางลื่นน้อยลง;
- การกระจายแรงขับช่วยลดความต้องการความแข็งแรงของชิ้นส่วน
- หน้ายาง ยางสึกสม่ำเสมอขึ้น
ทั้งหมดนี้ทำให้สามารถใช้ระบบขับเคลื่อนสี่ล้อได้อย่างกว้างขวางในเครื่องจักรที่ทรงพลังและมีราคาแพง ซึ่งการเพิ่มราคานั้นไม่สำคัญนัก
วิธีขับรถขับเคลื่อนสี่ล้อ
เพื่อให้ตระหนักถึงความเป็นไปได้ทั้งหมดของระบบขับเคลื่อนสี่ล้อ จำเป็นต้องศึกษาคุณลักษณะการออกแบบของรถยนต์รุ่นใดรุ่นหนึ่ง เพื่อทำความเข้าใจว่ารูปแบบการส่งสัญญาณทำงานอย่างไร
- อย่าใช้ระบบขับเคลื่อนสี่ล้อแบบเสียบปลั๊กโดยไม่มีส่วนต่างของศูนย์บนแอสฟัลต์ ซึ่งจะทำให้สึกหรออย่างรวดเร็ว
- ในการฝึกขับรถบนถนนที่ลื่นในมุมโค้ง มักจะเป็นรถยนต์ขับเคลื่อนสี่ล้อ โดยเฉพาะอย่างยิ่ง รถที่มีการถ่ายโอนแรงบิดอัตโนมัติหรือส่วนต่างอิสระ อาจมีพฤติกรรมที่คาดเดาไม่ได้ โดยจะเปลี่ยนพฤติกรรมจากขับเคลื่อนล้อหน้าเป็นขับเคลื่อนล้อหลัง และในทางกลับกัน และจำเป็นต้องทำงานกับคันเร่งในทางกลับกันด้วยกลยุทธ์ที่ตรงกันข้าม diametrically รถยนต์ที่เพิ่มการยึดเกาะสามารถหายไปด้วยการลื่นไถลในเทิร์นหรือเริ่มเลื่อนเพลาหน้าออก เช่นเดียวกับการลดการสั่นสะเทือนของเพลาล้อหลังที่เริ่มต้นขึ้น
- เสถียรภาพที่ดีของรถ 4×4 ในฤดูหนาวอาจหายไปในทันทีสำหรับคนขับ คุณต้องเตรียมพร้อมสำหรับสิ่งนี้ เพราะรถยนต์แบบโมโนไดรฟ์จะเตือนล่วงหน้าเสมอว่าจะสูญเสียการยึดเกาะถนน
- ความสามารถข้ามประเทศที่ยอดเยี่ยมไม่ควรนำไปสู่การเยี่ยมชม "การซุ่มโจมตี" หรือทุ่งหิมะโดยปราศจากความคิด ความสามารถในการออกจากสภาวะดังกล่าวโดยไม่มีรถแทรกเตอร์ขึ้นอยู่กับยางที่เลือกมากกว่าความสามารถของระบบอัตโนมัติในเกียร์
ในเวลาเดียวกัน ในกลยุทธ์การขับขี่ที่สมเหตุสมผล รถขับเคลื่อนสี่ล้อจะช่วยหลีกเลี่ยงปัญหาที่ monodrives จะเจอได้เร็วกว่ามาก อย่าเพิ่งใช้มันมากเกินไป

ในอนาคตรถยนต์ทุกคันจะได้รับระบบขับเคลื่อนสี่ล้อ ทั้งนี้เนื่องมาจากความก้าวหน้าของเทคโนโลยียานยนต์ไฟฟ้า เป็นเรื่องง่ายมากที่จะใช้โครงร่างที่มีมอเตอร์ไฟฟ้าสำหรับแต่ละล้อและอุปกรณ์อิเล็กทรอนิกส์กำลังขั้นสูง
รถยนต์เหล่านี้ไม่ต้องการความรู้ด้านวิศวกรรมเกี่ยวกับประเภทของการขับเคลื่อนอีกต่อไป คนขับจะต้องควบคุมแป้นคันเร่งเท่านั้น ส่วนที่เหลือของรถจะจัดการเอง